Why Claude Code for Firmware Development Matters
You might think that using Claude Code for Firmware development doesn’t matter.
Sadly, your thinking would be misplaced. AI Assistants like Claude Code can help solve a large number of problems that I see developers and teams struggle with everyday.
For example, I see firmware teams drowning in technical debt while racing to ship a buggy product, hoping that they’ll be able to go back and fix things IF they can just get through this delivery.
I see mountains of legacy code nobody understands. Reference manuals measured in thousands of pages that no one reads. Toolchains that break when Mercury’s in retrograde or when the wind blows in just the right direction.
AI coding assistants promise help. Copilot autocompletes your next line. ChatGPT answers your questions. Unfortunately, I’ve found that in many cases these tools are horrible. These tools work great if you have a general question or are doing business or marketing related work.
But here’s the thing: neither of these tools were really designed for developers. They’re generic models and I’ve abandoned many of them for firmware development.
Before you abandon all AI code assistnants yourself, here’s the silver lining: using Claude Code for firmware development changes this equation. It’s not just another autocomplete tool. It’s the first AI assistant built for the way software engineers actually work, and that includes embedded software engineers!
In this post, I’ll share with you some of my experiences using Claude Code for firmware development and how its’ architecture matters for firmware work, how to set it up for your embedded projects, and practical workflows that save hours, not minutes. This is the first in my ‘Faster, Smarter Firmware with AI’ series.
Let’s dig in.
The ‘AI Doesn’t Work for Embedded’ Myth
I hear this constantly: “AI tools don’t work for embedded because we work with hardware.”
On the surface, it sounds reasonable. We have memory constraints. Real-time deadlines. Register-level programming. Hardware that doesn’t exist until six months into the project. Of course generic AI tools fall short.
But here’s what I’ve noticed: this argument is increasingly wrong for most firmware work.
Modern embedded software is fundamentally decoupled from hardware. We write application code that runs above hardware abstraction layers. We create device drivers through well-defined interfaces. We build business logic that doesn’t care whether it’s running on an STM32 or an NXP chip.
The reality? Most firmware engineers spend their time writing code that could run anywhere! It’s managing state machines, implementing protocols, processing data, and coordinating system behavior. The hardware-touching code is maybe 20% of a modern firmware project and it’s behind an abstraction layer! (At least the good ones are . . . )
And yet we keep treating all embedded development like it’s register manipulation.
What Modern Firmware Actually Looks Like
Let’s be honest about what we’re really doing:
We’re writing application logic in C or C++. We’re implementing communication protocols. We’re managing complex states across multiple subsystems. We’re processing sensor data and making decisions.
Yes, we have constraints. But those constraints don’t prevent AI tools from being useful or helping us create that logic. It just means we need to teach the AI about our constraints.
I’ve been using Claude Code for firmware projects for the past few months. Here’s what I’ve learned: the tool doesn’t know embedded systems specifically, but it understands software development deeply. And when you’re writing decoupled, well-architected firmware, that’s exactly what you need.
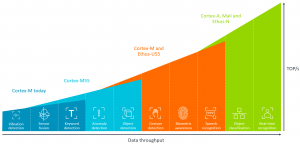
Look at the diagram below. There isn’t a single part of this firmware workflow where AI can’t play part to at least review code. In fact, in many cases it can be used to help develop your CI/CD pipeline, your build system files, dev containers, and generate code IF you are careful.

Why Claude Code for Firmware Actually Works
Claude Code wasn’t designed specifically for embedded systems. It was designed for software developers. But that’s exactly why it works.
The architecture has three features that matter for firmware work:
- Extended context window (200,000 tokens). This is huge. You can give it your entire codebase, your architecture decisions, your constraints, and actual documentation. It doesn’t forget what you told it three sessions ago. (When you exceed the context window, it will compact the conversation to keep things moving forward productively rather than forget).
- Persistent project context via claude.md. You write down your project’s constraints once such as memory budget, RTOS rules, coding standards, hardware platform and it’s always there. Every conversation starts with that context loaded.
- Terminal-native workflow. It lives where you already work: the command line. No switching between browser tabs and IDEs. It’s right there next to your build system and debugger. There’s even a Visual Studio Code extension you can download.
These aren’t firmware-specific features. They’re good software engineering features. But they happen to solve the exact problems firmware teams face.
The claude.md File: Teaching AI Your Constraints
This is the make-or-break piece. The claude.md file sits in your project root and describes everything an experienced engineer would need to know before touching your code.
For firmware projects, mine typically includes:
- Target hardware platform (MCU, memory, peripherals we actually use)
- RTOS or bare-metal approach, with task priorities if relevant
- Memory budget and any special memory regions
- Build system and toolchain specifics
- Coding standards (MISRA if you use it, internal standards)
- Architectural patterns we follow
- The critical “don’ts” (no dynamic allocation, ISR constraints, etc.)
Here’s a real example from one of my projects (simplified to demonstrate the idea):
# IoT Sensor Node Project
## Hardware Platform
- **MCU**: STM32L476RG (80 MHz Cortex-M4F, 128KB RAM, 1MB Flash)
- **Power**: Battery-operated (CR2032), must average <1mA current draw
- **Sensors**:
- BME280 environmental sensor (I2C1, address 0x76)
- LIS3DH accelerometer (SPI2, for motion detection)
- **Radio**: LoRa SX1276 (SPI1) for long-range communication
- **Memory Map**:
- SRAM: 0x20000000-0x2001FFFF (128KB)
- Flash: 0x08000000-0x080FFFFF (1MB, bootloader at 0x08000000-0x08007FFF)
## Real-Time Constraints
- Sensor readings every 60 seconds (normal mode)
- Motion-triggered readings must occur within 500ms of detection
- Radio transmission must complete within 2 seconds
- Deep sleep between operations is mandatory
## Architecture
- **Bare metal** (no RTOS - power considerations)
- Event-driven main loop with state machine
- Power management FSM: SLEEP → SENSE → TRANSMIT → SLEEP
- Hardware abstraction layer isolates all peripheral access
- Separate modules: sensor drivers, radio driver, power manager, protocol handler
## Build System & Toolchain
- **Compiler**: GCC ARM Embedded 10.3 (arm-none-eabi-gcc)
- **Build**: GNU Make
- **Optimization**: -Os for size, -O2 for time-critical functions only
- **Linker**: Custom linker script (STM32L476RG_FLASH.ld)
- **Debugger**: ST-Link V2 with OpenOCD
## Coding Standards
- **Language**: C99 (no C++)
- **Style**: 4-space indents, max 100 chars per line
- **Naming**:
- Functions: `ModuleName_FunctionName()` (e.g., `Sensor_ReadTemperature()`)
- Variables: camelCase for local, g_PascalCase for global
- Macros: ALL_CAPS_WITH_UNDERSCORES
- **Documentation**: All public functions must have Doxygen-style comments
- **Testing**: Unit tests required for all business logic (not HAL)
## Critical Don'ts
- **NEVER** use `malloc()`, `free()`, or any dynamic allocation after initialization
- **NEVER** use `printf()` or any stdio functions (code bloat + undefined behavior)
- **NEVER** block in main loop - all delays must use low-power sleep modes
- **NEVER** access peripherals directly - always use HAL functions
- **NEVER** use floating point in time-critical paths (no hardware FPU usage in ISRs)
- **NEVER** poll sensors - use interrupt-driven reads where possible
## Allowed Libraries
- CMSIS (core peripheral access only)
- Custom HAL (in `src/hal/` directory)
- No external libraries without approval
## Power Budget
- Deep sleep (STOP2 mode): <2µA
- Active sensing: <5mA for <100ms
- Radio TX: <100mA for <2 seconds per transmission
- **Target average**: <1mA (enables 6+ months on CR2032)
## Memory Budget
- Application code: Max 256KB (leave 768KB for bootloader updates)
- RAM usage: Max 64KB (leave 64KB safety margin)
- Stack: 4KB allocated
- Heap: NONE (no dynamic allocation)
## Testing Strategy
- Unit tests run on host (x86) with mocked HAL
- Integration tests run on target hardware with automated test harness
- Power consumption validated with current meter on every release build
- Coverage target: 80% for application logic, 100% for critical state machines
## Known Issues & Workarounds
- STM32L476 I2C has errata with clock stretching - use DMA mode only
- LoRa radio requires CS pin held low for 1ms before SPI transactions
- BME280 first reading after power-up is always invalid - discard it
## File Structure
```
src/
├── main.c # Main loop and initialization
├── state_machine.c # Power/operational state management
├── hal/ # Hardware abstraction layer
│ ├── gpio.c
│ ├── i2c.c
│ ├── spi.c
│ └── power.c
├── drivers/ # Device drivers
│ ├── bme280.c # Environmental sensor
│ ├── lis3dh.c # Accelerometer
│ └── sx1276.c # LoRa radio
└── protocol/ # Communication protocol
├── packet.c # Packet formatting
└── protocol.c # Protocol state machine
```
## Important Notes for AI Assistance
- When generating code, assume all HAL functions return error codes (0 = success)
- Power consumption is THE critical constraint - always consider sleep modes
- All sensor data must be validated before transmission
- Radio airtime is expensive - batch sensor readings when possibleThis takes maybe 30 minutes to write. But once it’s there, every conversation with Claude Code starts from this baseline. I don’t re-explain that we’re power constrained. I don’t repeat that we can’t use dynamic allocation. It knows.
How I’ve Actually Used Claude Code for Firmware Development
Let me give you specific examples from my recent work. These aren’t hypotheticals. These are tasks where using Claude Code for firmware development actually saved me significant time.
Driver Generation from Datasheets
I needed to configure a new sensor over I2C. The datasheet was 127 pages. Rather than manually transcribing register definitions and figuring out initialization sequences, I gave Claude Code the datasheet and my claude.md constraints.
It generated:
- Register address definitions
- Initialization sequence respecting my power-up timing
- Read/write functions following my HAL pattern
- Error handling matching my system’s approach
Did I verify every line? Absolutely. Did it save me 4 – 20 hours of tedious work? Also yes.
Simulation Harness Creation
Modern firmware needs simulation. We can’t wait for hardware to test business logic. I had a state machine managing system modes, and I wanted to test it without real hardware.
I asked Claude Code to generate a simulation harness. It created:
- Mock implementations of all hardware interfaces
- A test runner that exercises state transitions
- Logging that shows system behavior
- Basic assertions for critical invariants
The simulation let me find three state machine bugs before hardware even arrived. That’s the power of a decoupled architecture plus AI assistance.
Test Case Generation
Unit testing firmware is tedious. Writing test cases for edge conditions, error paths, boundary values. It takes forever, so most teams skip it. (Don’t deny it! I see it everyday. We talk the talk but do you walk it?)
I’ve been using Claude Code for firmware development to generate test scaffolding. Give it a function, your testing framework, and constraints, and it produces:
- Happy path tests
- Error condition tests
- Boundary value tests
- Mock setup code
I still review and adjust. But the tedious scaffolding work? That’s automated now.
Refactoring Legacy Code
The worst firmware task: refactoring tightly coupled legacy code. I had a module with hardware access scattered throughout. No tests. Unclear dependencies.
I used Claude Code for firmware development to systematically:
- Identify all hardware accesses
- Propose a hardware abstraction interface
- Suggest refactoring steps that preserve behavior
- Generate mock implementations for testing
The refactoring that would have taken at least two weeks took four days. And the result was testable, maintainable code.
Getting Started: Setup Claude Code for Firmware Development
Installing Claude Code takes about 15 minutes. You need Node.js 18+ and a terminal. That’s it. The actual installation is well-documented on Anthropic’s site.
The real work is writing your claude.md. Don’t overthink it. Start simple:
Minimal viable claude.md:
- What hardware platform you’re using
- Memory constraints
- RTOS or bare metal
- Key architectural patterns
- Critical rules (what absolutely can’t happen)
Write 20 lines. Use it for a few days. Add more as you discover what context helps.
Your First Practical Session
Here’s how I start a typical session:
Bad: “Help me with this peripheral driver”
Better: “I need an I2C driver for BME280 sensor following our HAL pattern in claude.md. It should support sleep modes for low power operation.”
Be specific about what you need. Reference your constraints. Describe success criteria.
Then iterate. Claude Code’s strength is multi-turn conversations. Let it analyze, review the analysis, then proceed with implementation.
When you get good results, save the conversation pattern. Share it with your team. Build a library of effective approaches for common firmware tasks.
Note: If you have something complex that needs to be done, press tab to toggle Claude Code into thinking mode. It will plan before it tries to write code. Otherwise, it will be chomping at the bit to write code, just like every other developer I’ve met.
The Limitations (Let’s Be Honest)
Claude Code for firmware development isn’t magic. It won’t fix bad architecture. It can’t eliminate testing. It doesn’t replace embedded expertise.
What it won’t do:
- Debug hardware issues (wrong pullups, timing violations, electrical problems)
- Optimize assembly-critical code
- Make architectural decisions for you
- Replace understanding of your system
What it actually does:
- Accelerates tedious implementation work
- Helps navigate unfamiliar codebases
- Generates test scaffolding and simulation harnesses
- Assists with refactoring and code reviews
Think of it as a force multiplier for things you already know how to do. It’s most valuable when you understand the problem deeply and need help with implementation details.
I’ve seen the best results when engineers use it for:
- Boilerplate driver generation
- Test case creation
- Legacy code analysis
- Protocol implementation
- State machine design validation
Your Next Steps to use Claude Code for Firmware Development
If you’ve made it this far, congratulations! Most firmware and embedded software engineers are ignoring AI. It’s a shame, because I strongly believe this is the future, more so than any other technology I’ve used in my 20 year career.
f you’re ready to try this, here’s how I’d suggest starting.
First, evaluate your architecture. Is your firmware decoupled? Do you have a hardware abstraction layer? Can you simulate parts of your system? If not, AI tools won’t help much yet. Fix your architecture first. Decoupling is the prerequisite.
Second, install Claude Code. It takes 15 minutes. Node.js 18+ and a terminal. That’s it. The installation docs on Anthropic’s site are clear. Get it running, then use Claude Code for firmware development.
Third, write your claude.md file. Start minimal. Twenty lines covering: hardware platform, memory constraints, RTOS or bare metal, key architectural patterns, and critical rules. Don’t overthink it. You’ll refine it as you use it.
Fourth, pick one high-value task. Don’t try to AI-ify everything on day one. Pick something tedious but well-defined:
- Generating a peripheral driver from a datasheet
- Creating test scaffolding for a module
- Building a simulation harness for business logic
- Refactoring a tightly-coupled legacy module
Run that task. See if it saves you time. Adjust your approach based on what works.
Chances are, you’ll find the first time or two take you much longer than if you just did it yourself. The ROI is everytime after that! Suddenly tasks that were time consuming speed up dramatically.
Fifth, document what works. When you get a good result, save that conversation pattern. Share it with your team. Build a library of effective prompts for common firmware tasks. This is how you scale AI assistance beyond yourself.
The shift isn’t just better tools. It’s that we’re finally building firmware like software. Decoupled. Testable. Simulatable. That creates opportunities for AI assistance that didn’t exist when firmware meant register manipulation.
What’s one firmware task your team keeps putting off because it’s too tedious? Could AI assistance help?
In the next article in this series, I’ll share specific metrics from teams using AI tools for firmware. We’ll look at where the time savings actually come from and how to measure productivity improvements honestly.
Accelerate Your Team’s AI Adoption
Want to skip the trial-and-error phase?
Reach out to [email protected] for consulting assistance to configure AI for your specific toolchain and build your first high-value workflows together.
Or subscribe to Jacob’s Embedded Bytes Newsletter to get the next article in this series delivered directly to your inbox.
Struggling to keep your development skills up to date or facing outdated processes that slow down your team, raise costs, and impact product quality?
Here are 4 ways I can help you:
- Embedded Software Academy: Enhance your skills, streamline your processes, and elevate your architecture. Join my academy for on-demand, hands-on workshops and cutting-edge development resources designed to transform your career and keep you ahead of the curve.
- Consulting Services: Get personalized, expert guidance to streamline your development processes, boost efficiency, and achieve your project goals faster. Partner with us to unlock your team's full potential and drive innovation, ensuring your projects success.
- Team Training and Development: Empower your team with the latest best practices in embedded software. Our expert-led training sessions will equip your team with the skills and knowledge to excel, innovate, and drive your projects to success.
- Customized Design Solutions: Get design and development assistance to enhance efficiency, ensure robust testing, and streamline your development pipeline, driving your projects success.
Take action today to upgrade your skills, optimize your team, and achieve success.